更新概要
- 领位地点列表页支持置顶与隐藏
- 巡航唤醒后可开启领位功能
- 巡航路线可支持本地设置
- 工厂递送的招财豹可设置为非餐厅场景
- 小程序新增指标“送餐层数”
- 充电提醒的弹窗5秒钟之后自动关闭
更新详情
1、领位地点列表页支持置顶与隐藏
- 长按地点名称可置顶或隐藏,再次长按可取消之前的置顶或隐藏状态;
- 点击领位模式侧边栏的“眼睛”图标,可以查看已隐藏的点位(半透明显示);
- 再次领位模式侧边栏的“眼睛”图标,恢复到隐藏模式,不展示已隐藏的点位;
- 已经置顶或隐藏的地点,在揽客模式下的领位及巡航唤醒后的领位,展示相同的状态。



2、巡航唤醒后可开启领位功能
- 揽客模式的设置项“揽客功能管理”中新增“巡航中领位”,默认为关闭状态
- 打开该开关之后,在巡航模式中唤醒后可露出“领位”功能,为顾客提供领位服务;领位完毕自动去往巡航路线中的下一个地点;

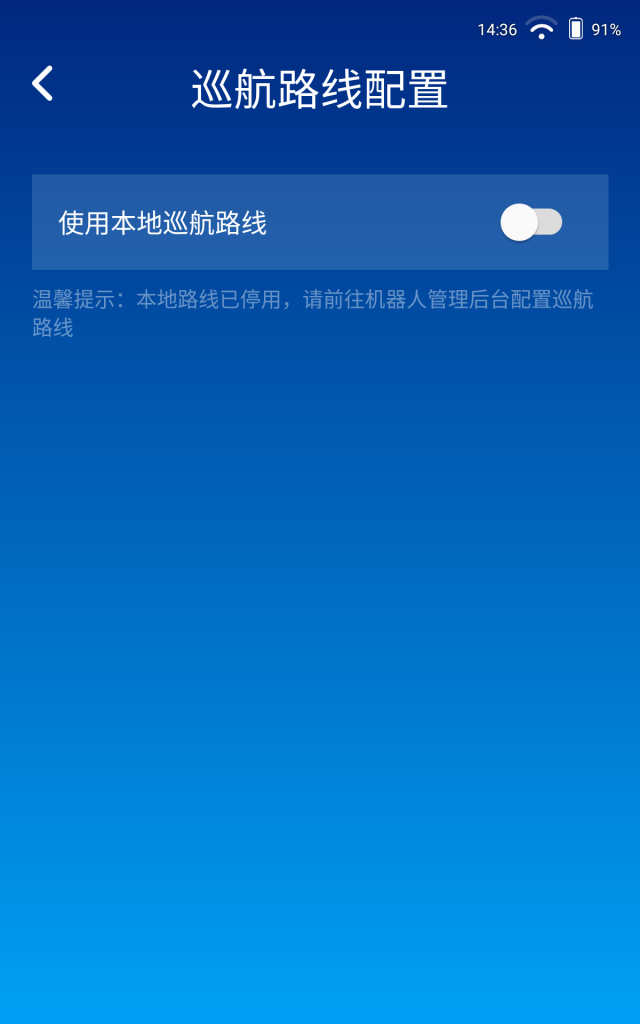
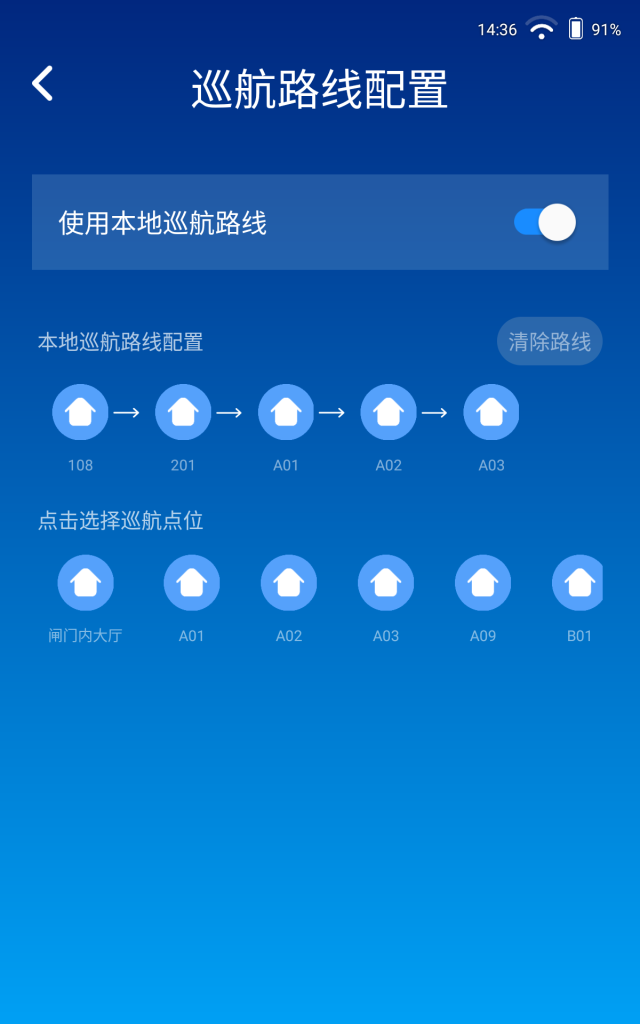
3、巡航路线可支持本地设置
- 开关设置项“使用本地巡航路线”:默认关闭,使用小程序下发的巡航路线
- 打开该开关之后,则忽略小程序的路线设置,以本地设置路线为准

4、工厂递送的招财豹可设置为非餐厅场景
- 送餐高级设置中新增“使用场景设置”:默认为“餐厅”
- 工厂环境下使用递送的招财豹,修改为“非餐厅”之后,机器人递送中的话术不再体现送餐的概念(送餐途中和到桌的播报话术需要使用小程序中的“图片营销模式”然后播报文字)


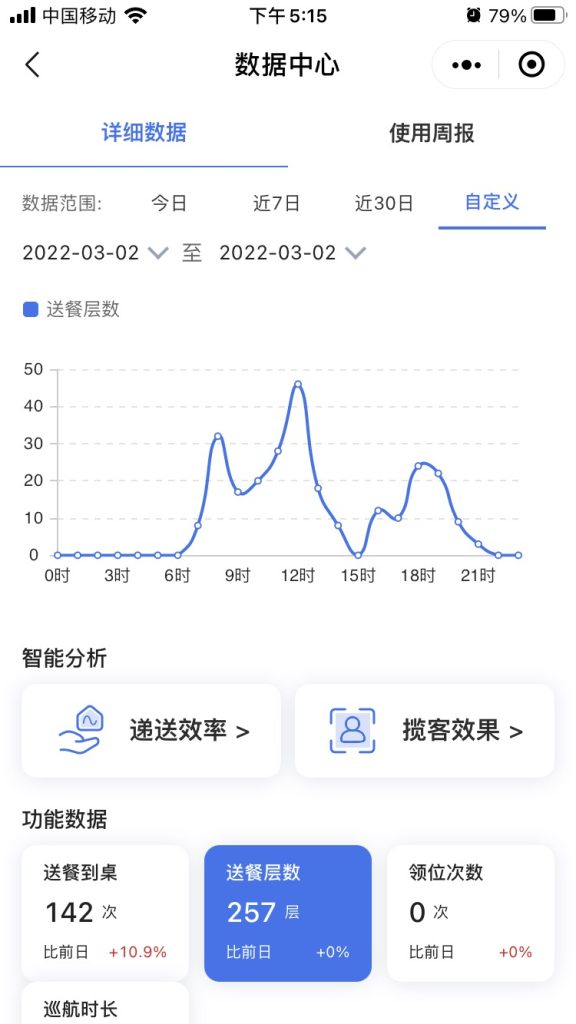
5、小程序新增指标“送餐层数”
送餐层数:开始递送的层数(3月2日开始有数据)
送餐到桌:成功送到的桌数
6、充电提醒的弹窗5秒钟之后自动关闭